[Updated] I organised a major mapping party in Milton Keynes, a couple of weeks ago. Mapping parties are where a group of like-minded OpenStreetMap mappers get together to tackle a defined area, in the course of a weekend (or weekday evening.) These days in the UK, many of the mapping parties are “second pass” (adding names to roads and features traced from aerial photography) or even “third pass” (adding in points of interest and missing detail, or even building outlines and house-numbers). However, Milton Keynes is unusual in that it was almost entirely unmapped on OpenStreetMap – a “blank canvas”, despite being relatively close to London, the origin of the project. The mapping party was an opportunity to get the active London-based mapping community (currently doing the London Mapping Marathon) together, along with local mappers from Milton Keynes, including those at the Open University campus, and other interested people from further afield. Milton Keynes is a large town, with a low-density structure – its 180,000 residents are spread over an area of nearly 100 square kilometres. As such, a large turnout was going to be key to get the place completed in a single weekend.
[osm_map lat=”52.034″ long=”-0.746″ zoom=”12″ width=”500″ height=”450″ marker=”52.051,-0.795″ marker_name=”wpttemp-red.png”]
The town is rather unusual in its design – a new town, split into numerous self-contained communities connected by a grid-pattern of major roads and roundabouts. This meant the “area cake” – splitting up the target area into segments for people to do individually – was easy to make, although many “slices” of the cake contained a large number of roads.
We did have a great turnout, with over 25 people over the course of the weekend, despite the brooding clouds on Saturday and intermittent rain on the Sunday. Both new and experienced mappers turned up, and we even had a family along, who mapped the central park. Those who hadn’t been before were generally impressed by the dramatic infrastructure of the town, with large, straight and almost empty roads. Milton Keynes is expanding rapidly – it’s set to double in size in the next 20 years – and it certainly has the infrastructure to do so, unlike almost every other town in the UK. This means many of the mapping providers (Google, the Ordnance Survey and Collins) have some of the newest areas completely missing from their maps. In theory, OpenStreetMap would have the most complete map of the town therefore, after we had visited all the areas. However, I underestimated just how far the town is expanding, and, having despatched myself to map one of the newest areas (Oxley Park and Westcroft in the far west of the town) I noticed several brand new suburbs which were not on any map. Unfortunately I ran out of time to completely map them all, having only given myself the Sunday afternoon to map, with Saturday spent organising things at the HQ. Having a dedicated meeting room in a hotel was a definite bonus (thanks to Twain for organising) but it was still a busy day with so many people converging at once.
The other aspect of the town that many found equally impressive and difficult to map, are that the town has three separate networks – the roads network, consisting of the grid roads and very wiggly interior roads, a comprehensive path network joining many of the cul-de-sacs together, and a large and complete cycle network – the “Redway” network, which is designed as an “alternative” set of highways for bikes. Unfortunately cycling in Milton Keynes has never really caught on – the distances are just too far – so this huge, dedicated network is almost completely unused. However the mappers on bikes found it a good, fast way to get to their allocated slice, and we tried to map as much of all three of the networks as we good.
In the end we just about finished the whole town – a few slices were left for local mappers to complete, and one of the London mappers even went back the following weekend to “third pass” the central business district, adding in the hotels and bars. I’m also back in the town in two weeks, I’m not planning on doing any active mapping but will check out our efforts on the newly rendered map.
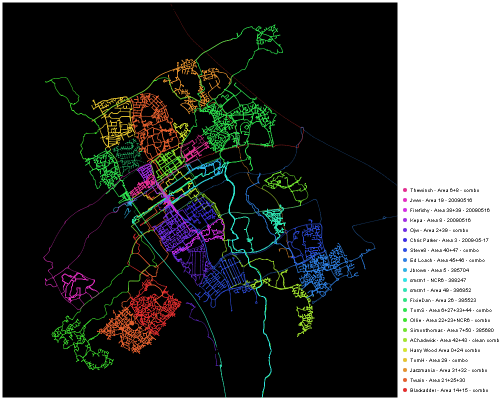
Being a GIS enthusiast, the best bit of the weekend was getting together all the GPX traces and creating the party render. You can see the animated version here.
The second best bit of the weekend was making a special trip to visit the famous Concrete Cows:

They are marked with the pin on the map above.
[Update – animation link fixed.]