I noticed for the first time yesterday, that individual trees are being stored in OSM, and being rendered on the default OSM/Mapnik map:
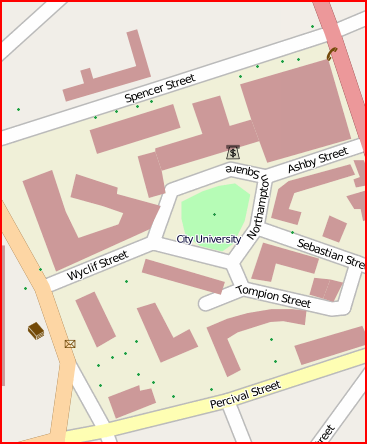
The green dots are points tagged with natural=tree, here at City University London.
OSM documentation for the natural=tree tag
This got me thinking – might I be able to build a “proper” orienteering map using entirely OpenStreetMap? Street-O* maps can already be produced with OSM data – this was some work I did last summer, and also am working on – but being able to produce an ISOM** map directly from OSM data is quite appealing. (ISSOM*** might be harder, as this standard requires roads to be shown at their actual width, rather than being linear features with fixed-width cartography.)
Most of the orienteering-specific features, such as pits and earth walls, wouldn’t show on the “public” renders of OSM data – the ‘general maps’, but a customised rendering could show these and have specialised cartography for them. As well as adding these new features, some existing features (e.g. natural=woodland) which are rendered on the general maps could have tags added to indicate the runnability level – orienteering maps have four levels of “greenness” for woods, and sometimes tree canopies are shown in white – this could be inferred from a size tag associated with a natural=tree point, medium being shown as a circle with a 5m circumference, for instance.
Many other features are already on OSM – paths, tracks, minor and major roads, as used in the Street-O maps, and also vegetation types, gates, walls and fences, that would appear in an ISOM/ISSOM based map.
My local park, Victoria Park, could be having a lot more detail added to it soon.
* Street-O: An informal orienteering discipline, run in urban areas with simple maps showing the street and path networks, and little else. Typically A4 at 1:10000
** ISOM: International Specification for Orienteering Maps. “Normal” orienteering races use these maps, which are full colour and very detailed, typically A3-A5 at 1:10000.
*** ISSOM: International Specification for Sprint Orienteering Maps. A much newer specification designed for the increasingly popular urban and sprint races, the map is almost a plan view of the ground, with roads shown at their correct width, sometimes with pavements shown seperately. Typically A3-A4 at 1:4000 or 1:5000.